Introduction
In the community and trait-based models, we used the
project() function to perform simple simulations where the
fishing effort was held constant throughout the duration of the
simulation. In the trait-based model example, we also looked at how the
effort for different gears could be specified. In this section we take a
detailed look at how the project() function works and the
different ways in which effort and time can be set up. This will allow
us to run more general systems like the multispecies model.
In mizer, simulations are performed using the
project() function. This function takes a
MizerParams object and projects it forward through time,
starting from an initial population abundance and with a pre-determined
fishing effort pattern.
Running a projection with project() requires various
arguments:
A
MizerParamsobject - The model parameters (see previous section);Fishing effort - The fishing effort of each gear through time;
Time arguments - Arguments to control the time of the simulation, including the simulation time step, the length of the simulation and how frequently the output is stored.
Initial population - The initial abundances of the stocks and the resource spectrum;
The help page for project() describes the arguments in
more detail.
The MizerParams class was explored in the previous
section. In this section we will look at the other arguments and use
examples to perform some simple projections.
The time arguments
There are four arguments that control time in the
project() function: dt, t_max and
t_save and t_start. All of them have default
values.
-
t_maxdetermines the maximum time of the simulation (in years), i.e. how long the projection is run for. The default value fort_maxis 100. -
dtis the time step used by the numerical solver inproject(). The smaller the value, the longer the model will take to run. Sometimes it is necessary to use a small value to avoid numerical instabilities. The default value is 0.1. -
t_savesets the interval (in years) at whichproject()stores the state of the model in the resultingMizerSimobject. For example, ift_save= 2, the state of the model is stored at t = 0, 2, 4… etc.t_savemust be a multiple ofdt. The default value oft_saveis 1. -
t_startis the year in which the simulation starts. This is only needed if you want to label the simulation results by the actual year rather than by the number of years that have elapsed since the start of the simulation.
Setting the fishing effort
The fishing effort argument describes the effort of the fishing gears
in the model through time. We have already seen that information on the
fishing gears and their selectivities and catchabilities is stored in
the MizerParams object.
There are three ways of setting the fishing effort. Examples of all three can be seen in the section on projection examples.
The simplest way is by passing the effort argument as a
single number. This value is then used as the fishing effort by all of
the gears at each time step of the projection, i.e. fishing effort is
constant throughout the simulation and is the same for all gears. We
have seen this method in the community and trait-based model sections
above. The length of the simulation is determined by the
t_max argument.
The second method for setting the fishing effort is to use a numeric
vector that has the same length as the number of gears. The values in
the vector are used as the fishing effort of each gear at each time
step, i.e. again, the fishing effort is constant through time but now
each gear can have a different constant effort. The effort vector must
be named and the names must be the same as the gears in the
MizerParams object. Again, the length of the simulation is
determined by the t_max argument.
Finally, the most sophisticated way of setting the fishing effort is
to use a two-dimensional array or matrix of values, set up as time step
by gear. Each row of the array has the effort values of each fishing
gear at a particular time time. The array must have dimension names. The
names of the first dimension (the row names) are the times. The steps
between the times can be greater than the dt argument but
the times must be increasing. The names of the second dimension (the
column names) must match the names of the gears in the
MizerParams object used in the projection.
It is not necessary to supply a t_max argument when the
effort is specified as an array because the maximum time of the
simulation is taken from the dimension names. If a value for
t_max is also supplied it is ignored.
Setting the initial population abundance
When running a simulation with the project() function,
the initial populations of the species and the resource spectrum need to
be specified. Default values for the initial values are automatically
set when creating a MizerParams object. However you can change these by
assigning new values to initialN() and
initialNResource(). initialN() should be set
to a matrix (with dimensions species x size) that contains the initial
abundances of each species at size (the sizes must match those in the
species size spectrum). initialNResource to a vector of the
same length as the the length of the full spectrum.
Projection examples
In this section we’ll look at how to run simulations with the
project() function. The examples will focus on how fishing
effort can be specified in different ways. The results of the
simulations will not be explored in detail. We will leave that for the section on exploring
the simulation results..
Remember that the fishing mortality by size on a species is the product of the selectivity, the catchability and the effort of the gear that caught it. We have not specified any catchability values in the species parameter data.frame so the default value of 1 is used. The selectivity ranges between 0 and 1. This means that in these examples the fishing mortality of a fully selected species is given by the effort of the gear that catches it.
Projections with single, simple constant effort
When we use a single value for the effort argument, the
value is used as a constant effort for all the gears. This method can be
particularly useful for quickly projecting forward without fishing (you
just set the effort argument to 0).
We will use a MizerParams object with four gears similar to the one
that we created in the section with
examples of making a MizerParams objects This example MizerParams
object is called NS_params and is shipped with the mizer
package. Let’s have a look at its summary:
summary(NS_params)## An object of class "MizerParams"
## Consumer size spectrum:
## minimum size: 0.001
## maximum size: 39851.3
## no. size bins: 100
## Resource size spectrum:
## minimum size: 2.12182e-13
## maximum size: 9.82091
## no. size bins: 179 (226 size bins in total)
## Species details:
## species w_max w_mat w_min f0 beta sigma
## 1 Sprat 33.0 13 0.001 0.6 51076 0.8
## 2 Sandeel 36.0 4 0.001 0.6 398849 1.9
## 3 N.pout 100.0 23 0.001 0.6 22 1.5
## 4 Herring 334.0 99 0.001 0.6 280540 3.2
## 5 Dab 324.0 21 0.001 0.6 191 1.9
## 6 Whiting 1192.0 75 0.001 0.6 22 1.5
## 7 Sole 866.0 78 0.001 0.6 381 1.9
## 8 Gurnard 668.0 39 0.001 0.6 283 1.8
## 9 Plaice 2976.0 105 0.001 0.6 113 1.6
## 10 Haddock 4316.5 165 0.001 0.6 558 2.1
## 11 Cod 39851.3 1606 0.001 0.6 66 1.3
## 12 Saithe 39658.6 1076 0.001 0.6 40 1.1
##
## Fishing gear details:
## Gear Effort Target species
## ----------------------------------
## Industrial 0.00 Sprat, Sandeel, N.pout
## Pelagic 1.00 Herring
## Beam 0.50 Dab, Sole, Plaice
## Otter 0.50 Whiting, Gurnard, Haddock, Cod, SaitheAs well as thinking about the effort argument we also
need to consider the time parameters. We will project the populations
forward until time equals 10 (t_max = 10), with a time step
of 0.1 (dt = 0.1), saving the output every time step
(t_save = 1). We use a constant effort value of 1.0.
sim <- project(NS_params, effort = 1, t_max = 10, dt = 0.1, t_save = 1)The resulting sim object is of class
MizerSim. At this point we won’t explore how the results
can be investigated in detail. However, we will use the basic summary
plot that you have seen before:
plot(sim)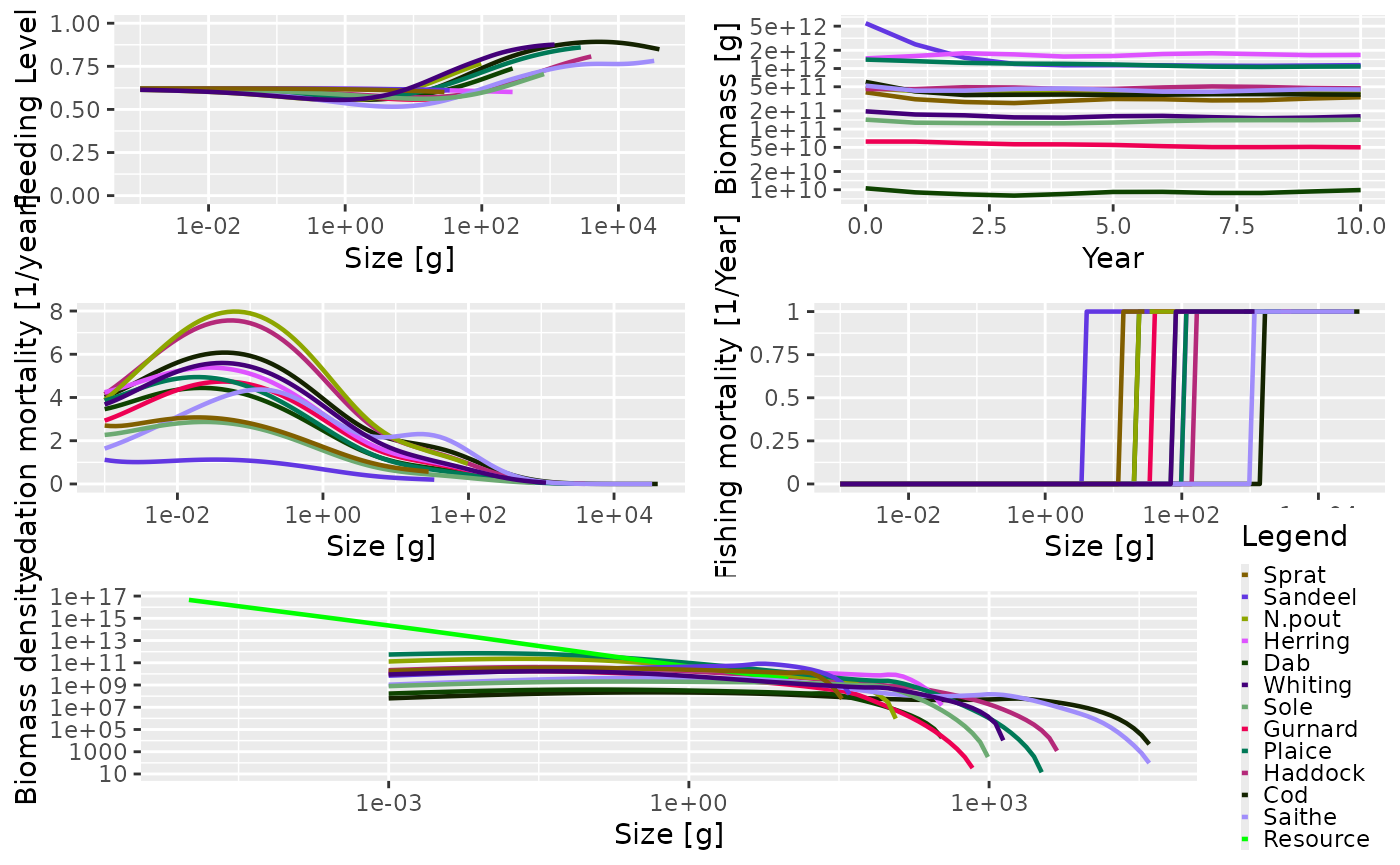
The big difference between this multispecies model and the trait-based model can be seen in the range of predation mortality and feeding level values. With the trait-based model all the species had the same predation mortality and feeding level patterns. Here the species all have different patterns, driven by their differing life history characteristics and the heterogeneous interaction matrix.
You can also see in the above figure that each species has different
fishing selectivity (see the fishing mortality panel). Remember that the
default setting for the fishing gears is a knife-edge gear where the
knife-edge is positioned at the species w_mat
parameter.
The effort through time can be inspected with
getEffort() (we use the head() function to
just show the first few lines).
## gear
## time Industrial Pelagic Beam Otter
## 0 1 1 1 1
## 1 1 1 1 1
## 2 1 1 1 1
## 3 1 1 1 1
## 4 1 1 1 1
## 5 1 1 1 1The effort slot shows the effort by time and gear. In
this example, we specified the effort argument as a single
numeric of value 1. As you can see this results in the same effort being
used for all gears for all time steps.
A summary() method is also available for objects of type
MizerSim. This is essentially the same as the summary for
MizerParams objects, but includes information on the
simulation time parameters.
summary(sim)If we decrease t_save but keep t_max the
same then we can see that the time dimension of the effort
array changes accordingly. This will also be true of the simulation
results returned by N() and NResource(). Here
we reduce t_save to 0.5, meaning that the effort and
abundance information is stored at t = 1.0, 1.5, 2.0 etc.
## gear
## time Industrial Pelagic Beam Otter
## 0 1 1 1 1
## 0.5 1 1 1 1
## 1 1 1 1 1
## 1.5 1 1 1 1
## 2 1 1 1 1
## 2.5 1 1 1 1Setting constant effort for different gears
As mentioned above, we can also set the effort values for each gear separately using a vector of effort values. This still keeps the efforts constant through time but it means that each gear can have a different constant effort.
We need to create a named vector of effort, where the names match the
gears. For example, here we want to switch off the industrial gear
(i.e. effort = 0), keep the pelagic gear effort at 1, set the effort of
the beam trawl gears to 0.3 and the effort of the otter trawl gear to
0.7. We set the effort like this:
effort <- c(Industrial = 0, Pelagic = 1, Beam = 0.3, Otter = 0.7)We then call project() with this effort and inspect the
resulting effort matrix (again we use the
head() function to just show the first few lines):
## gear
## time Industrial Pelagic Beam Otter
## 0 0 1 0.3 0.7
## 1 0 1 0.3 0.7
## 2 0 1 0.3 0.7
## 3 0 1 0.3 0.7
## 4 0 1 0.3 0.7
## 5 0 1 0.3 0.7You can see that the effort for each gear is constant but each gear
has the effort that was specified in the effort
argument.
This impact of this can be seen plotting the fishing mortality. There
is a dedicated plot, plotFMort(), that shows the fishing
mortality at size for each species at a particular time step (the
default is the final time step). The fishing mortality on each of the
species is determined by the effort of the gear that caught it.
plotFMort(sim)
An example of changing effort through time
In this example we set up a more complicated fishing effort structure
that allows the fishing effort of each gear to change through time. As
mentioned above, to do this, effort must be supplied as a two
dimensional array or matrix. The first dimension is time and the second
dimension is gear. The dimensions must be named. The gear names must
match the gears in the MizerParams object. Also, as
mentioned above, if effort is passed in as an array then the length of
the simulation is determined by the time dimension names and the
argument t_max is not used. Instead the simulation runs
from the earliest time in the effort array to the latest.
In this example, we will project forward from time to time . The effort of the industrial gear is held constant at 0.5, the effort of the pelagic gear is increased linearly from 1 to 2, the effort of the beam trawl decreases linearly from 1 to 0, whilst the effort of the otter trawl decreases linearly from 1 to 0.5.
First we create the empty effort array:
gear_names <- c("Industrial","Pelagic","Beam","Otter")
times <- seq(from = 1, to = 10, by = 1)
effort_array <- array(NA, dim = c(length(times), length(gear_names)),
dimnames = list(time = times, gear = gear_names))Then we fill it up, one gear at a time, making heavy use of the
seq() function to create a sequence:
effort_array[,"Industrial"] <- 0.5
effort_array[,"Pelagic"] <- seq(from = 1, to = 2, length = length(times))
effort_array[,"Beam"] <- seq(from = 1, to = 0, length = length(times))
effort_array[,"Otter"] <- seq(from = 1, to = 0.5, length = length(times))The first few rows of the effort array are shown as an illustration:
head(effort_array)## gear
## time Industrial Pelagic Beam Otter
## 1 0.5 1.000000 1.0000000 1.0000000
## 2 0.5 1.111111 0.8888889 0.9444444
## 3 0.5 1.222222 0.7777778 0.8888889
## 4 0.5 1.333333 0.6666667 0.8333333
## 5 0.5 1.444444 0.5555556 0.7777778
## 6 0.5 1.555556 0.4444444 0.7222222The first row gives the effort between times 1 and 2, the second between times 2 and 3, and so on. The time 10 row in the array is not actually used, except to set the final time for the simulation.
Now we can use this effort array in the projection:
## gear
## time Industrial Pelagic Beam Otter
## 1 0.5 1.000000 1.0000000 1.0000000
## 2 0.5 1.111111 0.8888889 0.9444444
## 3 0.5 1.222222 0.7777778 0.8888889
## 4 0.5 1.333333 0.6666667 0.8333333
## 5 0.5 1.444444 0.5555556 0.7777778
## 6 0.5 1.555556 0.4444444 0.7222222As you can see, it can be quite fiddly to set up a complicated effort array so it may be easier to prepare it in advance as a .csv file and read it in, similar to how we read in the interaction matrix in the section with an examples of making a MizerParams object. We give an example of this in the section on the North Sea model.
Note that in this example we set up the effort array so that the
effort was set every whole time step (e.g. time = 1, 2, etc). This does
not have to be the case and it is possible to set the effort more
frequently than that, e.g. at time = 1.0, 1.5, 2.0, 2.5 etc. The only
restriction is that the difference between time dimension names must be
at least as big as the dt argument.
Now that we know how to run a simulation, the we are ready to learn how to explore the simulation results.