Mizer includes a number of calibrated multi-species systems:
- North Sea (
NS_paramfrom Blanchard et al, 2014; included with the mizer package). This calibration is made with a species-specific interaction matrix and gear. Note of caution: this calibration is done with eRepro=1. This means that reproduction is close to the maximum reproductionR_maxand thus the model may be less sensitive to fishing than is realistic, and the calibration should be used with caution. - North Sea (
NorthSea_params), Baltic Sea (Baltic_params), Benguela current (Benguela_params), North East US Continental Shelf (NEUSCS_params), and the Barents Sea (Barents_params) (from Jacobsen et al, 2016). These systems are calibrated with purely size-based predation, i.e., no species-specific interactions. They are set up with three fishing gears targeting small, medium and large species.
The models are available as MizerParams objects. Running, and plotting is as simple as:
## Loading required package: mizer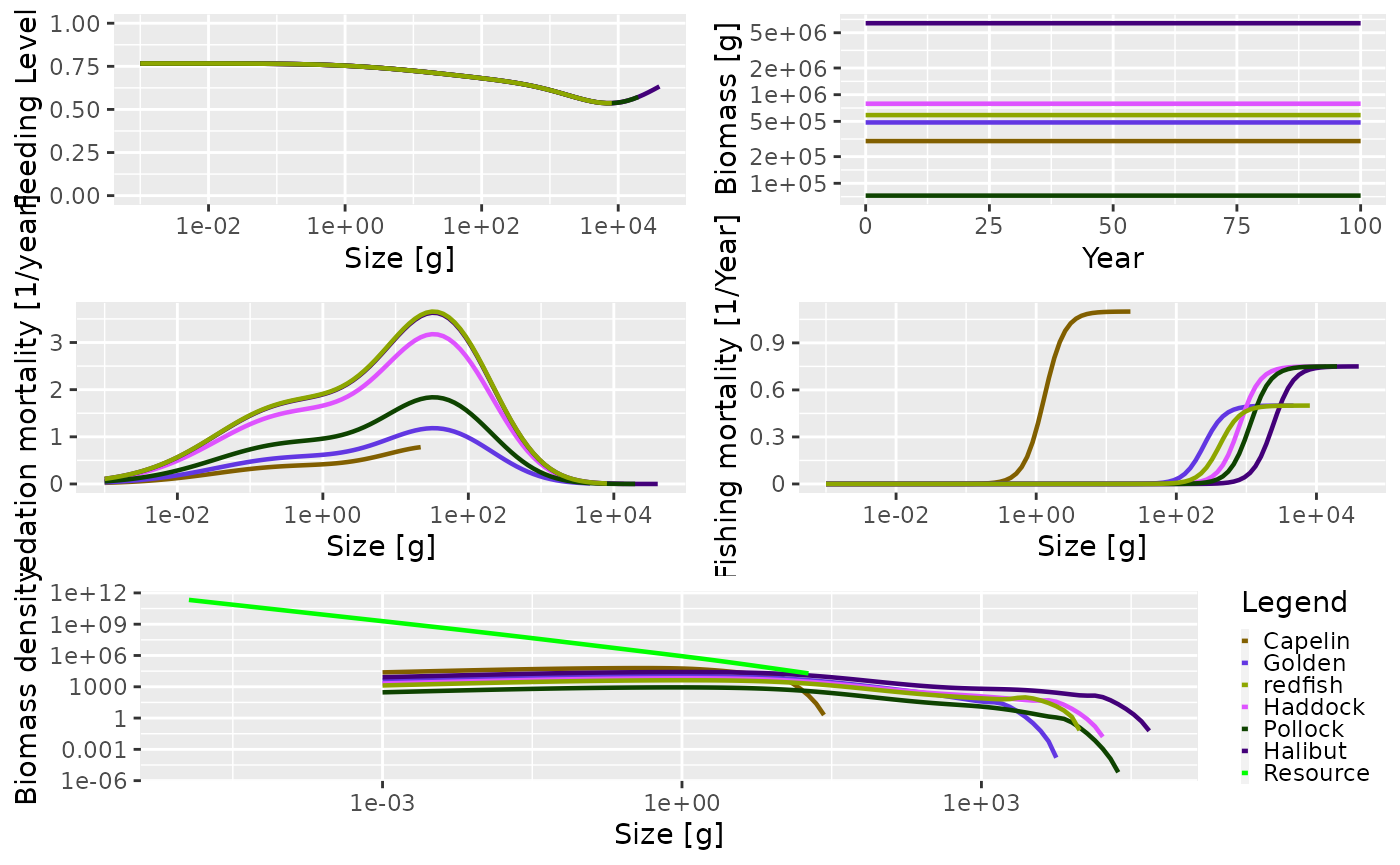
The models are calibrated to specific efforts for each of a number of fishing gear. For example, the Barents Sea model has three gears: small, medium, and large, and is callibrated with the efforts:
getInitialEffort(Barents_params)## small medium large
## 1.10 0.50 0.75To see which species are caught by these gears, we look at the gear parameters data frame:
gear_params(Barents_params)## species gear sel_func catchability sigmoidal_weight sigmoidal_sigma
## 1 Capelin small sigmoid_weight 1 1.3 3
## 2 Golden medium sigmoid_weight 1 250.0 3
## 3 redfish medium sigmoid_weight 1 420.0 3
## 4 Haddock large sigmoid_weight 1 800.0 3
## 5 Pollock large sigmoid_weight 1 1125.0 3
## 6 Halibut large sigmoid_weight 1 2400.0 3Simulating with a different effort is done by:
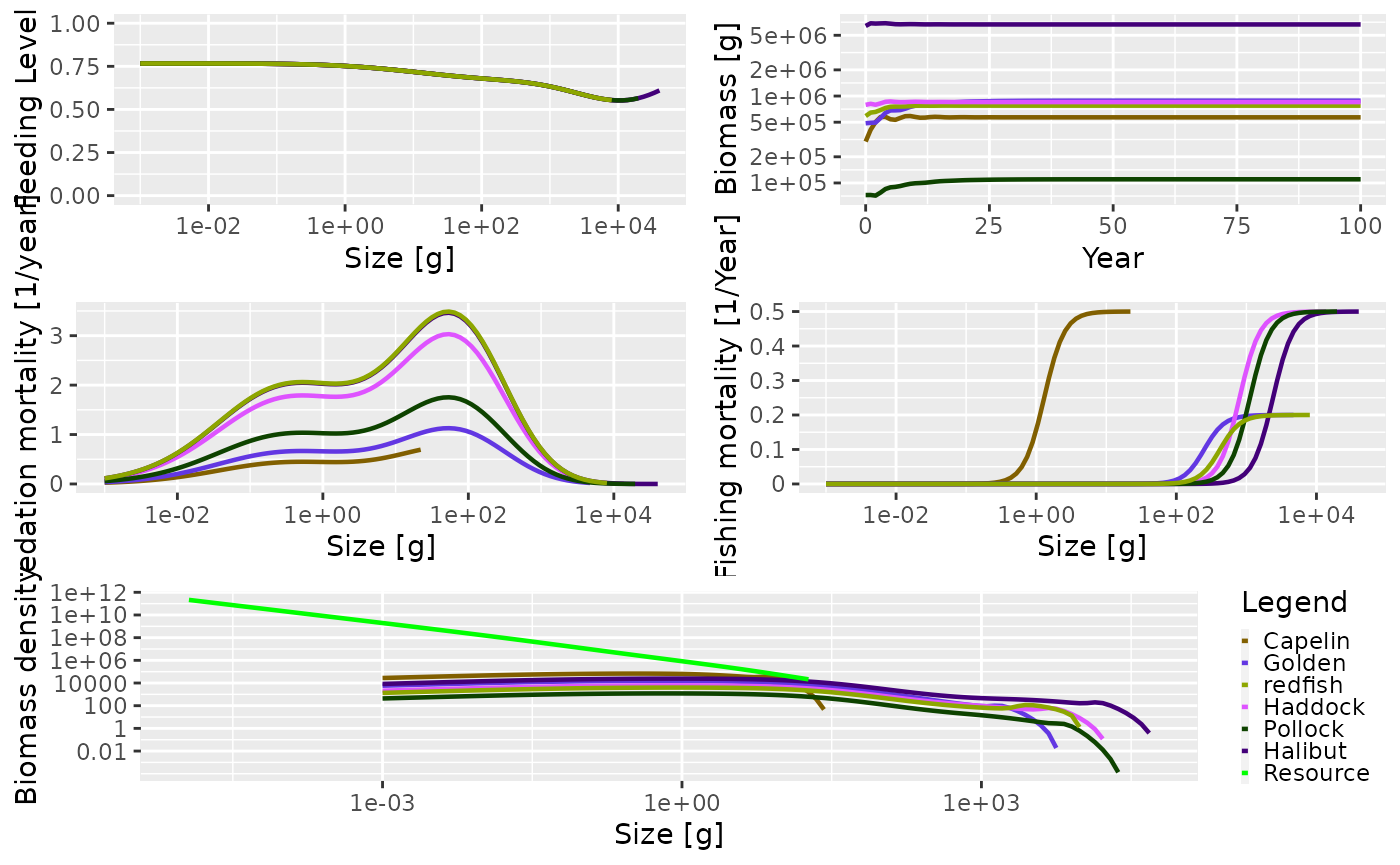
The calibrated efforts are described in the help pages for each calibrated model.